隨著汽車智能化、網聯化進程的加速,高性能、高可靠性的車載攝像頭系統已成為高級駕駛輔助系統(ADAS)和自動駕駛(AD)領域不可或缺的核心部件。其中,基于Maxim(現為ADI一部分)的MAX9295A串行器、MAX96717解串器芯片組,以及圖像傳感器(如SCS5501、SCS5502)的解決方案,因其出色的性能、穩定性和抗干擾能力,在車載攝像頭模組設計中備受青睞。實現此類方案的車載攝像頭量產,并配套相應的計算機軟硬件及網絡技術開發,是一個涉及多學科、多環節的系統工程。
一、核心硬件方案:芯片組兼容性與攝像頭模組量產
1. 芯片組選型與特性
- MAX9295A串行器:專為汽車應用設計,支持高達3.12Gbps的GMSL(千兆多媒體串行鏈路)串行輸出,具備出色的電磁兼容性(EMC)和抗擾度。它能將圖像傳感器(如SCS5501/2)的并行視頻數據、控制信號(I2C/SPI)和電源高效地整合并通過同軸電纜或雙絞線進行長距離、低延遲傳輸。
- MAX96717解串器:與MAX9295A配對使用,負責在接收端(如域控制器、車載主機)恢復視頻流和控制通道,支持多路攝像頭輸入聚合,是構建多攝像頭系統的關鍵。
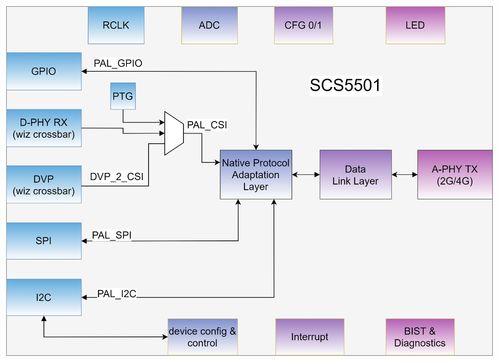
- 圖像傳感器SCS5501與SCS5502:這兩款傳感器通常具備高動態范圍(HDR)、高分辨率、低照度性能優異等特點,適用于前視、環視、后視等多種車載場景。確保其與MAX9295A的接口(如MIPI CSI-2)完全兼容并優化時序是關鍵。
2. 量產核心挑戰與對策
- 信號完整性:在PCB設計階段,必須嚴格遵循高速信號布線規則(如阻抗控制、等長、屏蔽),確保GMSL鏈路在嚴苛的車載電磁環境中穩定工作。量產前需進行充分的信號完整性測試和EMC測試。
- 電源管理與熱設計:車載環境溫度范圍寬(如-40°C至+105°C),需采用車規級電源芯片和精細的電源樹設計,保證各芯片穩定供電。緊湊的攝像頭模組需考慮散熱,防止高溫下性能衰減。
- 一致性校準:量產中,每個攝像頭模組需進行自動化的光學標定(如畸變校正、焦距調整)、白平衡、色彩一致性校準以及串行鏈路功能測試,確保大批量產品的性能均一和可靠。
- 供應鏈與車規認證:所有核心元器件(包括MAX9295A、MAX96717、傳感器、無源器件)必須符合AEC-Q100/Q101等車規標準,并建立穩定的供應鏈體系,以滿足汽車行業對質量和長期供應的要求。
二、配套計算機軟硬件及網絡技術開發
1. 硬件平臺開發
- 接收端硬件平臺:設計或選用集成MAX96717(或多路解串器)的車載計算平臺,如域控制器或專用處理單元。該平臺需具備強大的處理能力(如集成高性能SoC,如NVIDIA Xavier、TI TDA4、華為MDC等),以處理多路高清視頻流的實時分析。
- 接口與擴展:平臺需提供豐富接口,包括千兆車載以太網(支持TSN時間敏感網絡)、CAN FD、LIN等,用于與車輛其他ECU通信,并支持OTA升級。
2. 軟件與算法開發
- 底層驅動與固件:開發MAX9295A/MAX96717的配置驅動、圖像傳感器驅動(針對SCS5501/2),以及Bootloader、操作系統(如Linux、QNX、Autosar Adaptive)適配層。確保視頻流穩定采集、低延遲傳輸。
- 中間件與框架:利用ROS 2、Cyber RT等自動駕駛框架,或定制中間件,實現視頻流的訂閱/發布、時間同步、資源管理。開發圖像預處理模塊(如去噪、HDR融合、畸變校正)。
- 核心視覺算法:基于接收到的視頻流,開發或集成ADAS/AD算法,如目標檢測(車輛、行人、交通標志)、車道線識別、語義分割、視覺SLAM等。這些算法需針對車載場景進行優化,平衡精度與實時性。
3. 網絡與系統集成技術
- 車載網絡架構:將攝像頭作為智能傳感器節點,通過高速串行鏈路連接至域控制器,再通過車載以太網骨干網接入整車網絡。設計符合功能安全的通信協議和數據流。
- 安全與信息安全:實現功能安全(ISO 26262 ASIL B/C等級)機制,如鏈路監控、數據校驗、故障注入與恢復。實施信息安全措施,如視頻流加密、身份認證、安全啟動,防止網絡攻擊。
- 數據管理與云交互:開發車載端數據記錄模塊,用于算法訓練和事故分析。結合5G/V2X技術,實現部分數據上傳云端,用于車隊管理、遠程診斷和算法迭代更新。
三、
成功量產基于MAX9295A、MAX96717及SCS5501/SCS5502的車載攝像頭,并構建完整的軟硬件系統,不僅要求深厚的硬件設計、信號處理和制造工藝功底,還需要強大的嵌入式軟件、計算機視覺和車載網絡開發能力。這是一個從芯片選型、硬件設計、固件開發、算法集成到整車測試驗證的全鏈條過程。只有各個環節緊密配合,才能打造出高性能、高可靠、符合車規要求且具備市場競爭力的智能車載視覺系統解決方案,為智能汽車的演進提供堅實的感知基礎。